Основные функции
- Управление шаговым двигателем привода ротатора
- Поддержка многоканального управления:
• Кнопки на корпусе (в некоторых версиях)
• Блок педалей (проводное и беспроводное подключение )
• Радиоканал 433 МГц (совместимость со стандартными брелками)
Конструктивные особенности
- Аппаратная часть:
- Два варианта исполнения:
- С кнопками управления на корпусе
- Без кнопок (управление только через педали или пульт)
- Два типа драйверов:
- Встроенный (для моторов до 2,5А)
- Внешний (для моторов свыше 2,5А)
- Водонепроницаемые разъемы для подключения:
• Блок привода
• Блок педалей
• Питание
- Два варианта исполнения:
- Корпус и монтаж:
- Материал: ударопрочный пластик (3D-печать)
- Защита: IP54 (пыле- и влагозащита)
- Крепление: монтажные "уши" под винты 6 мм
- Элементы управления:
• Светодиодный индикатор режимов
• Влагозащищенные кнопки
• Выключатель питания
Режимы работы
- Ручное управление
- Плавное вращение с регулируемой скоростью
- Управление: педали/брелок
- Корректировка скорости: кнопками "+/-"
- Угол поворота зависит от времени удержания кнопки
- Автопоиск (6°-180°)
- Автоматическое сканирование зоны
- Настройка угла: кнопками "+/-"
- Скорость задается в ручном режиме
- Удержание направления
- Автокоррекция при поворотах лодки
- Ручная корректировка положения
- Автоматическая калибровка магнитометра
- Автоматическая компенсация крена
- Удержание вала
- Жесткая фиксация вала в заданном положении
Преимущества системы:
✔ Гибкое управление (3 варианта контроля)
✔ Защита от внешних воздействий
✔ Надежное крепление в лодке
✔ Поддержка мощных шаговых двигателей
✔ Четкая световая индикация режимов
Рекомендации:
Для оптимальной работы функции удержания направления установите контроллер одной стороной параллельно поверхности воды. Система автоматически адаптируется к положению.
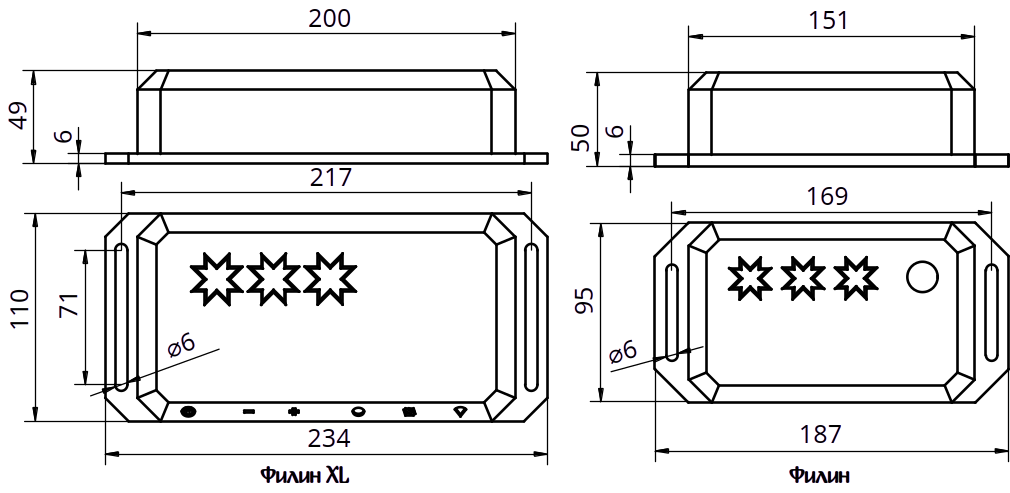
"Филин" (базовая версия)
- Компактный корпус без кнопок управления (все функции вынесены на блок педалей)
- Полный набор интеллектуальных режимов: ручное управление, автопоиск, удержание курса, блокировка вала
- Идеален для скрытого монтажа – малые габариты и отсутствие кнопок управления на корпусе позволяют установить в любом месте лодки
- Рекомендуется для:
- Троллинга на умеренных скоростях (до 6 км/ч)
- Использования с одним датчиком эхолота
"Филин XL" (усиленная версия)
- Увеличенный корпус с кнопками управления на панели (удобная настройка без педалей)
- Мощный встроенный драйвер шагового двигателя (ток до 4А)
- Устойчивость к нагрузкам – работа на сильном течении и высоких скоростях (до 10–12 км/ч)
- Рекомендуется для:
- Сканирования на высокой скорости
- Установки нескольких датчиков на штангу
- Эксплуатации в сложных условиях (волны, течение)
"Филин мини" (моноблок, эконом-версия)
- Вся электроника интегрирована в привод – нет внешнего блока управления
- Упрощенное управление: только ручной режим и фиксация вала (без автопоиска и удержания курса)
- Ценовое преимущество – оптимальный вариант для перехода с механического на электронный ротатор
- Рекомендуется для:
- Рыбалки в спокойных водах
- Пользователей, ценящих простоту и минимализм
"Филин про" (моноблок)
- Все функции в компактном моноблочном исполнении
- Дополнительные возможности:
- Дистанционное управление по радиоканалу 2,4 ГГц (педали) и 433 МГц (брелок)
- Автоматические режимы (автопоиск, удержание курса)
- Защита от перегрузок
- Рекомендуется для:
- Профессионального использования (соревнования, рыболовные туры)
- Лодок с ограниченным пространством для монтажа
| Критерий | Филин | Филин XL | Филин мини | Филин про |
|---|---|---|---|---|
| Потребляемый ток, А | 0,5 | 0,7...2 | 0,5 | 0,6 |
| Напряжение питания. В | 12 | 12 | 12 | 12-24 |
| Двигатель Filin17 | Да | Да | Да | Да |
| Двигатель Filin23 | - | Да | - | - |
| Режимы | Все | Все | Ручной | Все |
| Ручное управление | Да | Да | Да | Да |
| Беспроводное управление | Да | Да | - | Да |
| Моноблок | - | - | Да | Да |
| Кнопки на блоке | - | Да | Да | Да |
| Цена | $$ | $$$ | $ | $$ |
Для сигнализации текущего режима работы в контроллере "Филин" предусмотрена световая индикация. Во время работы серия коротких световых сигналов и пауз между ними информируют пользователя о текущем режиме работы, а серия быстрых вспышек - о поступлении управляющей команды от блока педалей или брелка.
Информация о световой индикации сведена в таблицу ниже, где:
- О - вспышка на индикаторе
- __ - пауза
- о_о_о_о_ - серия коротких вспышек
| Тип сигнала | Описание |
|---|---|
| О___________ | Режим ручного управления (по умолчанию) |
| O__O________ | Режим автопоиска |
| О__О__О____ | Режим удержания цели |
| О__О__О__О__ | Режим отсутствия авторизации |
| о_о_о_о_ | Получена команда от блока педалей или брелка |
С логикой управления электронным ротатором можно ознакомиться на странице технической поддержки.
Привод подключается к контролеру с помощью 4-х жильного гибкого кабеля через специальный водонепроницаемый 4-х пиновый разъем (разъём идет в комплекте).
| Номер контакта | Назначение | Цвет провода |
|---|---|---|
| 1 | Обмотка A+ | красный |
| 2 | Обмотка А- | синий |
| 3 | Обмотка В+ | зеленый |
| 4 | Обмотка В- | чёрный |
Для подключения привода к контролеру можно использовать любой гибкий кабель с четырьмя медными жилами, выдерживающими установленный ток шагового двигателя (1-3А) и сохраняющий гибкость во всем интервале рабочих температур и обеспечивающий защиту от УФ излучения.
Блок педалей подключается к контролеру с помощью гибкого кабеля через специальный 5 пиновый разъем.
При подключении педалей к блоку управления по кабелю, блок управления переходит в проводной режим и прекращает принимать сигналы по радиоканалу. В этом режиме управление брелоком отключается.
Это может быть полезно в том числе если по соседству с Вами используют аналогичный брелок 433 МГц, сигналы с которого могут приниматься блоком управления.
| Номер контакта | Назначение |
|---|---|
| 1 | Питание +5В для зарядки аккумулятора в блоке педалей |
| 2 | Земля |
| 3 | Данные |
| 4 | Сигнальный |
Настройка параметров
Контроллер поддерживает гибкую настройку через:
- Непосредственно во время работы
- WEB-интерфейс (подстройка способ)
- Командную строку (CLI, для продвинутых пользователей)
Выбор режимов работы
Переключение между режимами осуществляется:
- Кнопками на блоке педалей (все версии)
- Блоке управления (только версии XL/M)
- Беспроводным брелком 433 МГц (поддерживаются режимы "Сканирование" и "Удержание направления")
Настройка режимов
Ручной режим
- Регулировка скорости поворота кнопками "+"/"-"
- Возможность настройки:
- Диапазона скоростей (min/max)
- Шага изменения скорости
(Настраивается в WEB-интерфейсе → "Привод" → "Движение")
Режим сканирования
- Управление углом поворота кнопками "+"/"-"
- Диапазон: 6°-180° (шаг настраивается)
- Скорость сканирования = скорости ручного режима
Режим удержания направления
- Автоматическая коррекция положения
- Отдельная настройка скорости поворота
(Настраивается в WEB-интерфейсе → "Привод" → "Движение")
- Отдельная настройка скорости поворота
Важно!
- Текущая логика управления зависит от версии ПО
- Актуальные особенности работы вашей версии уточняйте:
🔗 Страница поддержки
При включении электронного блока управления "Филин" осуществляется проверка авторизации . Если авторизация не пройдена, то управление ротатором блокируется и включается точка доступа с WEB интерфесом. При этом на экране WEB интерфейса отображается причина блокировки и необходимые действия.